TEAM MEMBERS
Onur Vatansever
Melisa Çakmak
Levent Kayın
Walking Robot Mechanism Walking robot mechanisms are motor powered mechanisms that walk using leg-like structures instead of wheels or threads. These mechanism are generally used in rough terrain where traditional wheels and threads cannot traverse.
Generally some sort of a “knee” mechanism and several (usually 4 or 6) legs are needed for complex robots in order to let them better resist shocks and improve balance in uneven terrain. However simple bipedal robots can also “walks”, there are also humanoid bipedal robots with “kneed”legs.
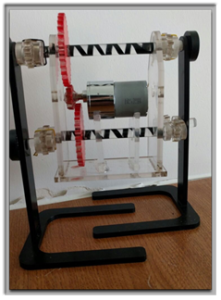
Our project is a simple bipedal mechanism that transforms the rotational motion of a motor into linear motion using a DC motor that runs at 60 RPM under a 9 Volt battery.
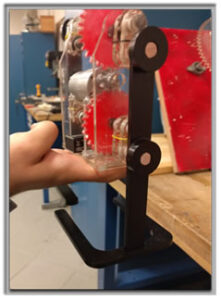
Design and Assembly
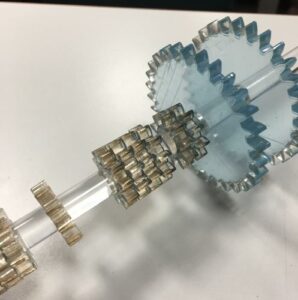
We designed 38 Plexiglas parts for this project. The Plexiglas parts were cut using laser. The design is based on the initial photo provided with the project. One dimensional projections were fed into the laser cutter and used to cut 5 millimeter parts. For the assembly we used a special Plexiglas adhesive, silicone and superglue.

Analytical Methods
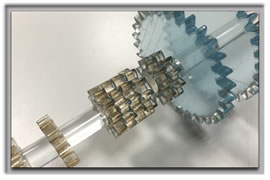
After the initial theoretical calculations we ran some theoretical analysis using Matlab. For the analysis we defined the relations between the two parts of the mechanism; the inner gears and the outer gears connecting to the legs. Then we differentiated the position vector using appropriate RPM to calculate velocity and acceleration values theoretically. Then we used Matlab to track a fixed dot on the leg and used that data to compare our theoretical and experimental results. Below you can find kinematic relations for our mechanism. Point 6 is used for the position/velocity/acceleration graphs.