TEAM MEMBERS
Tuğberk Tetikcan
Yiğit Yakupoğlu
The design of gripping mechanisms has been the aim of several researches in the field of robotics. Robotic grippers are employed in robotic manipulators that perform repetitive tasks. The use of grippers is also limited to grasping of object with regular geometries. Robotic hands have a high number of degrees of freedom and a complex control system but our project that we designed has only one degree of freedom and also it does have not a control system. On the market there are few mechanism for industrial and non industrial applications, like Barret hand.
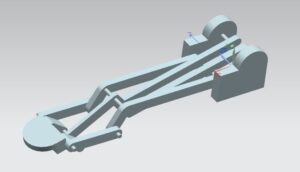
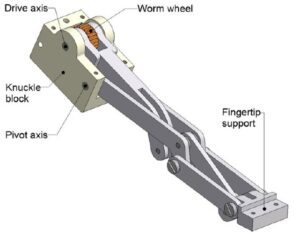
TIn designing part, we had trouble with to find design of a six bar linkage with one degree of freedom for an anthropomorphic three-jointed finger mechanism. After many researches we found some articles, which was related to our project. We tried to use these articles but also in these articles the design of the picture of mechanism was not detailed enough and also dimensions were not specified in these articles. First we tried to design our mechanism but design did not assemble or move in Siemens NX 8.5 properly, finally we achieved to design it perfectly.
Conclusion
For this project, our purpose was applying kinematics equations by using what we learned in the dynamic class, designing motorized human finger perfectly , manufacturing fingers and evaluating an experiment on the system. Firstly we figured how to use rotation motion for fingers. During the process, we went to industry and learn about which kind of material is best cost efficient and also mobile. In addition, we have seen all process of manufacturing. We created theoretical simulation from matlab program. At the end we compare theoretical and experimental data , and showed the result thought out this paper.
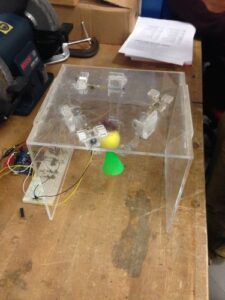
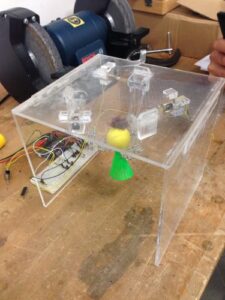
Throughout the entire design process, manufacturing was treated as a high priority. The entire hand only has 13 machined Plexiglas components, one metal shaft, which is steel screw and also screw nuts. We used Plexiglas for our project because it is lighter than metals . We also thought that the finger should portable so Plexiglas is the best choice for our project. While we were manufacturing our designed, we had some problems. The first one was that we could not fix screw nuts on screws so when finger moves, screw nuts are getting loose and then they will be failed. The second problem was that we could not connect screw shaft to motor. After some researches we found coupling which is a device used to connect two shafts together at their ends for the purpose of transmitting power. After we tried to find coupler, which is suitable for our screw shaft, we could not find any so we were machined coupler in CNC.