TEAM MEMBERS
Erencan Karadağ
Denizhan Akbal
In this project, our assignment was to design, manufacture and dynamically analyze a basic robotic fish system which has been developed since the early 90’s.
In this project, our assignment was to design, manufacture and dynamically analyze a basic robotic fish system which has been developed since the early 90’s.

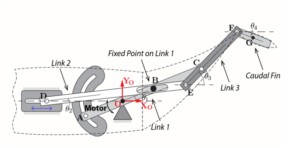
The system of a robotic fish mainly consists of 4 links and 2 fixed rails. The power input is given by a motor to one link and other links move with respect to the rotational movement of the first link with respect to the power input point.
A preliminary design of the system was made with respect to the Figure 1.1 from the respective article with arbitrary length and width values for individual pieces of the system, only adhering to the length ratios between the links to create a sample motion simulation of the system on NX 8.5.
After ensuring the sample system was able to move with the desired degrees of freedom, a research was made for the available bearing sizes and motors in the market. Then, the design was finalized with the required sizes with respect to the sample design and market research as it is shown below.