Hüseyin Can Özdemir
Delta robot is a machine which can move objects by picking up and putting down. It is using widely in packaging, medical and pharmaceutical industry. First it was produced to manipulate light and small objects at very high speed but then with developments the machine shaped up to carry more heavy objects.
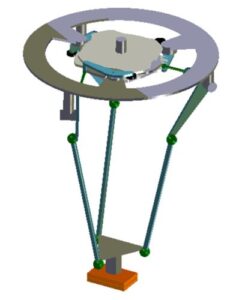
In our project, first we tried to understand how it works. Generally delta robots have three servo motors in each arm. But in our mechanism, we have three disks at different height and three cam followers which touch cams at the same time. We hanged three disks in the middle of a bigger plate. Instead of using three servo motors, a 24V 10 rpm DC gear motor is used. The motor fixed on the motor on three disks which is also fixed on the big plate. Pick up- put down mechanism is working with cam followers and rods. Cam followers are moving on a plane, the link between cam follower and lower arm is moving in 3D and lower links are also in 2D. Actually a delta robot has to pick an object and put it another place. Due to spring problem we couldn’t do that play. To show that is working, we tied a laser to follow its path.
We should have used ball and socket joints but we couldn’t find small enough for our delta robot. So instead of using eye bolts, we preferred using springs to make the same move which is 360 degrees. Some problems, such as calculations, turned out because of spring usage.