TEAM MEMBERS
Ezgi Çevik
Çisem Nurhan
Batuhan Atılgan

The Prosthetic Hand is an artificial hand that gives freedom to amputees to use it instead of their lost hand. This mechanism is an exact example of a four bar mechanism. The expectation from our project is to design at least two fingers and a thumb to be able to grasp an object. In our project, however, we designed and manufactured four fingers and a thumb. In this mechanism, worm and gear set drives the four bar mechanism in fingers and rotates them, also opens and closes the thumb in both vertically and horizontally. In our project, we are not only expected to design and manufacture the hand but also to analyse the dynamics of all the important points in the mechanism, compare the actual results with the theoretical values and use Matlab or any other software to simulate the system.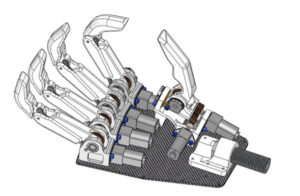
Our CAD Design
At the beginning of our design process, we shared the parts that need to be designed. We gave the parts numbers and names as “Finger part 1” or “Finger Box”.
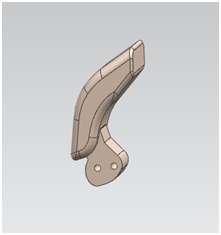
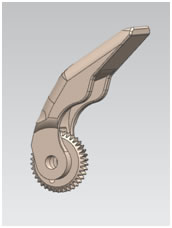
Finger Part 1
Finger Part 2
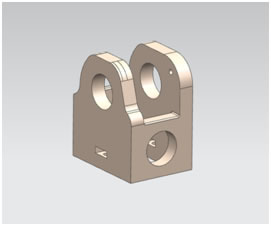
Finger Box
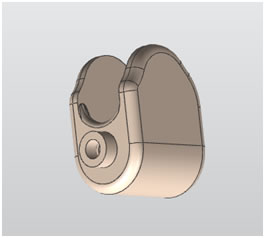
Thumb
Firstly, we designed “Finger Part 1 & 2”, “Finger Box” and “Thumb” parts. In order to obtain appropriate dimensions we measured normal human hand and fingers. We draw our parts according to an average human hand size. However, the most challenging part of our design process was to find worm and gear sets that are small enough to fit in our design. We searched worm and gear sets in Istanbul and talked to approximately 20 manufacturers, however either we could not find the worm and gear sets in appropriate size or the price to manufacture was extremely high (2800 TL for 6 worm & gear sets). Thus, we ordered our worm and gear sets from Hong Kong by Ebay. Although we ordered them from Hong Kong, they were still larger than we expected so we increased our parts’ dimensions and redesigned our parts.
Box for Holding Thumb
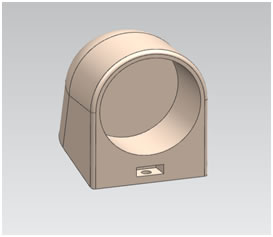
Motor Holder for Thumb
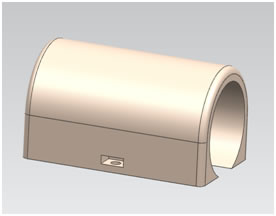
Motor Box for the Thumb
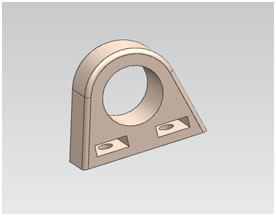
Motor Holder for the Thumb
Motor Box for the Finger Motors
Secondly, we designed covers and motor holders for both fingers and the thumb. The challenging part of this process was changing the original design of the motor holders for thumb. We adapted the design of motor holders for the thumb because the worm gear set was not appropriate for the older design.
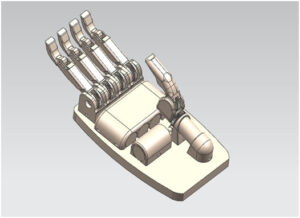
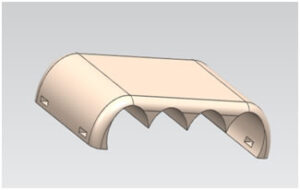
After the design of the motor holders and covers we designed the palm of the hand. In the first design of the palm, palm was shorter but in the last design we made the palm longer and gave space for two Arduinos that are required to rotate our motors.
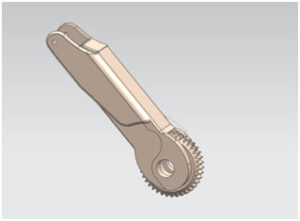
Then, the design of the link was the easiest; however it was one of the most important parts for the working principle of four bar mechanism.
Link
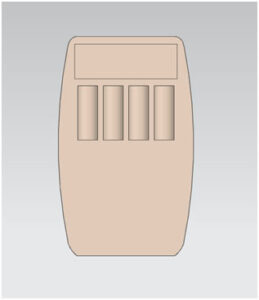
First Design of the Palm
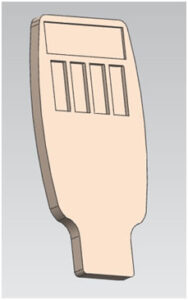
Last Design of the Palm
Before assembly, we designed the parts that we did not manufacture such as motors, gears and worms.
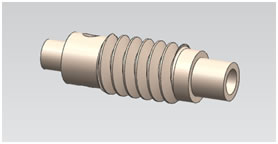
Worm
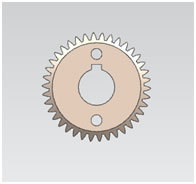
Gear
Motor
After designing all of the parts, we assembled our parts and controlled the motion of the fingers. After completing the assembly, we manufactured our parts with 3D machine at our school. However, we could not manufacture the palm of the hand at the school since the palm is larger than the 3D machine could manufacture and it was costly. Thus, we manufactured the palm outside of the school with Plexiglas.

Parts after manufacture
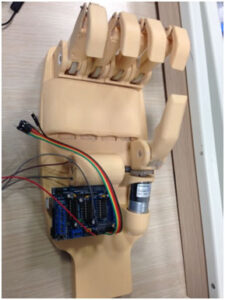
Prosthetic Hand after Assembly