TEAM MEMBERS
Arif Suha Torun
Osman Kağan Aydın
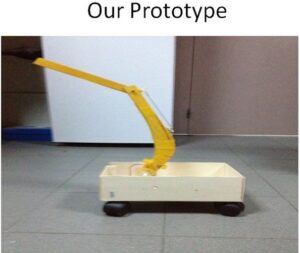
As group 6, our project was to design and dynamically analyze a mini excavator. First of all, we would like to start the report with some background information. Excavators are heavy construction equipment consisting of a boom, stick, bucket and cab on a rotating platform (known as the “house”). Below we can see some excavators used in real life applications. Excavators are heavy construction equipmentt consisting of a boom, stick, bucket and cab on a rotating platform (known as the “house”). Usege
Digging of trenches, holes, foundations
Material handling
Brush cutting with hydraulic attachments
Forestry work
Demolition
General grading/landscaping
Heavy lift, e.g. lifting and placing of pipes
Mining, especially, but not only open-pit mining
River dredging
Driving piles, in conjunction with a pile driver
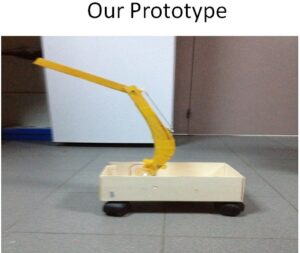
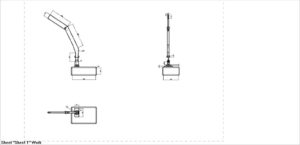
After we successfully manufactured our prototype, we started creating the model in the computer aided design medium. We basically drew the parts in a UG.
After that, we started doing our dynamic analysis of the project. We started with drawing the basic simple kinematic diagram of the prototype.
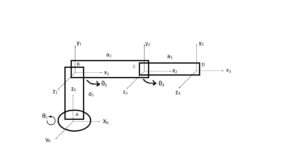
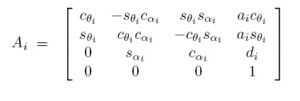
As seen in the picture, we placed some coordinate frames to the joint points accordingly so that the method we used in our calculations which is called “Denavit Hartenberg Convention” should be valid in each case. In our method, we create a transformation matrix for each point, A, B, C, and D as shown in the diagram. These matrices are 4×4 matrices the first 3 elements of the last column of these matrices gives us the position coordinates of the relevant points with respect to the origin of its coordinate frame. Here is a general transformation matrix in Denavit Hartenberg Convention and what each variable stands for: