TEAM MEMBERS
Onur Yücesoy
Sedat Yaylagül

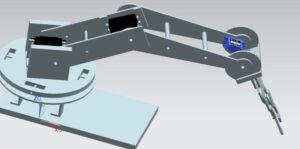
Design: For the appropriate design we examined various robotic arm designs on internet. In the end we combined some of those designs to get the best results for our robotic arm. During the designing part we used nx 8.5. After the rough design was ready we shared it with our TA and made some adjustments according to his advises. We redesigned parts those cannot be manufactured via laser cutting machine and we adjusted cavities for servo motors. After the design was finalized we assemled it in nx prior to manufacturing to see any likely problems beforehand. We had six servo motors working with a five degree of freedom in the original design. However due to an accident during the experiments the servo motor attached to the gripper got broken so we took it out. After we finalized our design we converted the files to solidwork and used the draftings as input for the laser cutting machine.
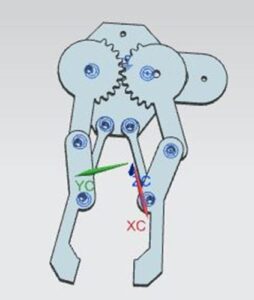
Manufacturing: We decided on using Plexiglas as the main material for frame since it is light and easy to manufacture via laser cutting and NX drawings. We had over 30 parts to manufacture from Plexiglas. Probably the biggest problem of the project was that it used too many parts and too many joint points to connect those parts. This resulted in a low stability for the system later on. Some of the other big problems were with gripper gears not fitting perfectly due to assembling mistakes and base of the system leaning to the side where the arm is facing. After many trials with glue and Plexiglas to reinforcing the separate arms by adding Plexiglas bars between them we used metal rods instead. Even though it is heavier it is also more stable since it does not depend on glue but rather pins to attach on the main frame. After we assembled the arm completely and stabilized it we tested the motors one by one. Even though the servo motor on top of the base had required torque