TEAM MEMBERS
Barış Özgen
Fatih Cemal Ülgen

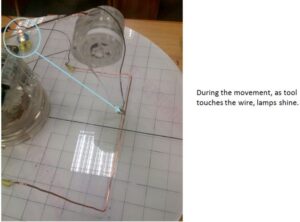
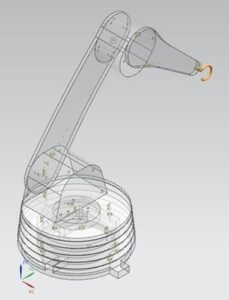
Modern approach to the knuckle boom crane ends up with robotic arm design. Conventional knuckle boom design, using pneumatic pistons to perform tasks. Robotic arm design, controlled and manipulated by servos and microcontrollers via computer interface.
The main concern in robotics design is it’s kinematics. Because it is crucial to know the exact position and orientation of the tool as the system operates.
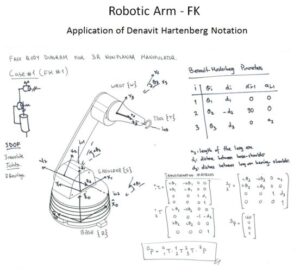
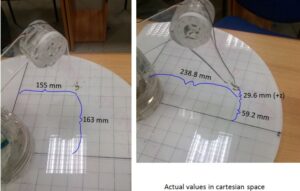
In part one(FINAL POSITION OF THE TOOL ), we’ll be dealing with forward kinematics: Description of frames on elements, transformation between frames, Denavit-Hartenberg Notation to calculate general transformation formula.
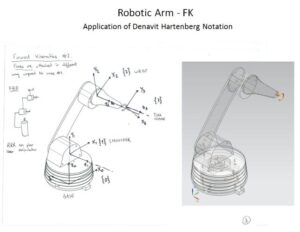
In part two(POSITION OF THE MANIPULATOR ELEMENTS ), we’ll be dealing with inverse kinematics: A general approach to derive inverse of the transformation operator.
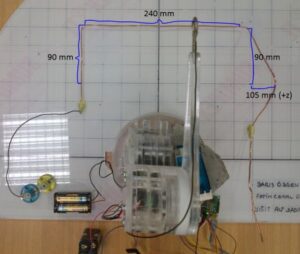
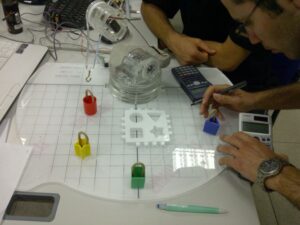
Plexiglas is used mostly in this project. Servo Motors rotates links. Three servos are connected to the computer interface via microcontroller, polulu maestro. Three bearings are used at joints, providing smooth movement. Pros of plexi are it is widely used in advertising industry, so it is cheap, strong for its density and can be cut with laser. It is possible to cut complex shapes with high accuracy. Transparency provides aesthetic apps. Cons of plexi are it is brittle. Because of its chemical content, it is dangerous to breathe while it is cut and glued. Chloroform is used as adhesive substance Servos used and their torques are as following:
Base: SM-S4315M SERVO (15.1 kg.cm)
Shoulder: SM-S4212M SERVO (13.1 kg.cm)
Wrist: SM-S3217M SERVO (5 kg.cm)
Wrist: SM-S3217M SERVO (5 kg.cm) Gluing is not preferred, so a lot of screw are used. To use screw, internal screw threads are cut. Typical screw sizes are M1.6, M2, M2.5, M3 and M4. Drilling bits according to the screw thread size are used, -0.5 mm of the size of the thread.