TEAM MEMBERS
Mert Can Güler
Murat Çelebi
In this project, the aim was to design and manufacture quadruped and kneed passive dynamic walker which walks 100 steps. First of all, the meaning of passive dynamic walker defined as; “It is a mechanism modeled after human and animal legs that can move without drawing any energy from a supply (such as a battery, engine, fuel, atp, etc.). It only uses the initial velocity given, and then continues walking using the potential energy it gains while walking”. The project was started by researching about current knowledge and experiments about passive dynamic walkers. After the researches, using a treadmill was decided to give motion to our passive dynamic walker by treadmill. Since it is a passive dynamic walker, there is no motor connected on passive dynamic walker, then a basic treadmill which runs with 1362 rpm motor was manufactured to give a motion to the system. After manufacturing treadmill and passive dynamic walker, kinematic analysis of velocity, acceleration and energy were done by recording a video of motion and calculating angles of the lower and upper legs.

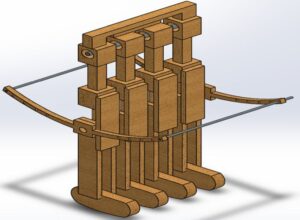
For designing the passive dynamic walker, the double pendulum simulations were used. There were some double pendulum simulations which the masses of upper and lower part can be changed and motion observed. From these simulations we get an idea of masses for the design. The design were done in NX. After NX design, Solid Works design helped us to calculate interties and center of masses.