TEAM MEMBERS
Doğanay Şirintuna
Özde Özenç
Defne Ege Ozan
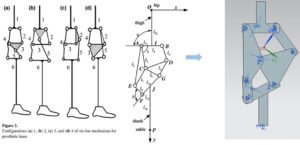
In this project, we explored the six-bar mechanism on an application of a model knee joint prosthesis. We primarily studied the four-bar mechanism, since we considered the six-bar mechanism to be composed of two linked four-bar mechanisms.
While four-bar mechanisms are more commonly employed in the prosthetic knees, some successful applications of six-bar mechanisms in these prostheses have been made. For example, Total Knee and 3R60 Knee by the Otto Bock Company are currently two products in the market. Since six-bar mechanisms come with more design variables than the conventional four-bar mechanisms, they can offer better functionality for the prosthesis if designed properly. Three aspects can be considered under functionality:
-
- The gait pattern (the trajectory of ankle joint in swing phase, which provides enough foot ground clearance)
- Angular displacement of the shank
- Stability in the standing phase
In this project, we focused on the second aspect and manipulated the design parameters such that we meet the natural human gait pattern.
DESIGN
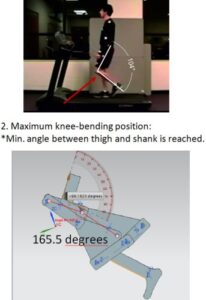
We developed our design on Siemens NX based on the study [1] provided to us. Since no scales or lengths for this configuration of the six-bar mechanism were specified, we investigated the natural human gait pattern to obtain the required design parameters for our project. We then determined the lengths of our parts by trial and error, in which our purpose was to reach a certain angle between the thigh and the shank at the maximum bending position of the knee.
According to our investigation, we have identified three states concerning the knee during the walking motion:


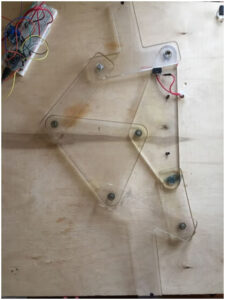
Our parts were laser-cut from Plexiglas. We bought the bearings and the long chrome rod that would serve as pins from İMES, Dudullu. We used tight-fit allowances for the holes on the Plexiglas where the bearings and pins were to be mounted, since the bearings and pins should not be moving inside the Plexiglas parts.
As for the electric equipment, we used a DC Motor, a motor driver, an Arduino Nano, and limit switches. The purpose of the limit switches is to restrict the angle range the rotating parts operate on, because a full rotation is not needed for the knee.