TEAM MEMBERS
Bülent Şanlı
Alp Saltan
1Project Proposal:
Trajectory of legend point should be investigated.
The links geometry of the legs should be chosen carefully by intensive kinematic study.
There quired phase difference between the legs should be chosen based on kinematic study.
The legs can then be actuated using motor and transmitted to the links via gears.
2 Used Areas:
Klann Linkage is used to replicate the walking mechanism of insects and providing more mobility in difficult terrains. It can be used for search and rescemissionsoral so for military applications. The robot itself can be produced in ver small proportion sand could be fit into very little spaces. It can be attached with a remote controller and a small camera for more mobility.
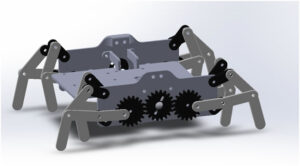
We designed our mechanical spider using Solidworks program. It was difficult because there were no specific dimensions. The mechanisms power links and dimensions of every part was very important to get the right motion and trajectory from the leg point.
Bottom Rocker: Used for having the leg hold its position and giving it a right movement
Gear: Taking rotational motion from the gear which is getting its power from the gear, which is connected to our continuous servo motor. It is designed so that our servo motors fit to its place in the assembly with screws and bolts to attach them.