TEAM MEMBERS
Ali Akşık
Alp KaanAlkoç
Berk Saatçı
INTRODUCTION
“Our project was to design a prosthetic hand powered by lead screw mechanisms. We used 3D-printed parts for a precise modeling process. Our hand is powered by 5 DC motors and one servo. Also there are connections for Arduinos and motor shields which allow digitalized control.”
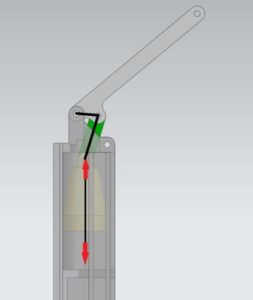
By using screw linear actuator mechanisms, we converted rotational motion into linear motion. Slider crank mechanism provides reciprocating motion from the internal shaft. The four-bar mechanism finalizes our motion in a way modeled on a human hand.
We modeled our model using Siemens NX 8.5 and created most of the parts of the hand by 3D-Printing. Wealsousedplexiglasandsomesteelpartsfortheleadscrewmechanismitself.
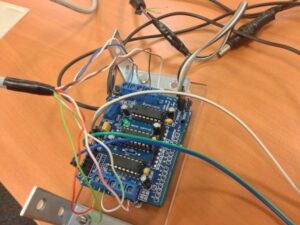
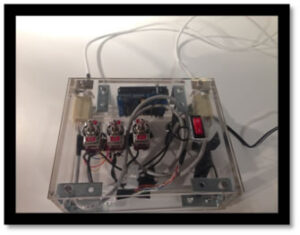
Finally we added Arduino controls, which were optional and could be replaced by analog logic.

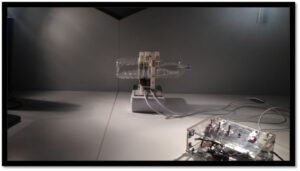
We created a robotic hand prototype. In our Project we used 3D printers and Plexiglas, Here you see our initial design vs our final product.


In our model, we used three different mechanisms:
Lead screw linear actuators,
Slider cranks,
and Four-Bar Mechanisms, which was the major mechanism constipating the finger’s movement.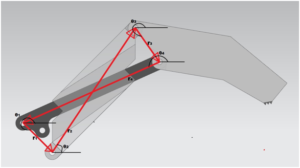


Another aspect was the electronical wiring, which took place on limited area.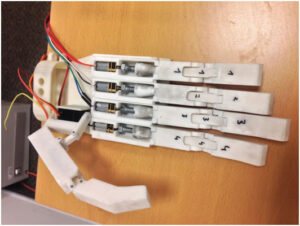
Also we built a remote control box that was connected by 2 Lan-Cables. We powered our system over a standard DC adapter which we could variably use at 6V and 9V depending whether we set up our system digitally or analog-controlled.

We hope you liked our design.